KOMPLEKSNI PREMIKI TOČKE
§ 1. Absolutno, relativno in figurativno gibanje točke
V številnih primerih je treba upoštevati gibanje točke glede na koordinatni sistem O 1 ξηζ, ki se nato premakne glede na drug koordinatni sistem Охуz, ki je pogojno sprejet kot fiksen. V mehaniki je vsak od teh koordinatnih sistemov povezan z nekim telesom. Na primer, upoštevajte kotaljenje brez drsenja kolesa vagona po tirnici. Nepremični koordinatni sistem Axy povežemo s tirnico, gibljivi koordinatni sistem Oξη pa s središčem kolesa in predpostavimo, da se premika naprej. Gibanje točke na platišču kolesa je sestavljeno ali kompleksno.
Predstavljamo naslednje definicije:
1. Gibanje točke glede na koordinatni sistem Oxyz (slika 53) se imenuje absolutno.
2. Gibanje točke glede na gibljivi koordinatni sistem O 1 ξηζ imenovano naseljeno.
3. Prenosno gibanje točke je gibanje te točke telesa, ki je povezano s gibljivim koordinatnim sistemom Približno 1 ξηζ, glede na fiksni koordinatni sistem, s katerim obravnavana gibljiva točka sovpada v danem trenutku.
Tako je translacijsko gibanje posledica gibanja gibljivega koordinatnega sistema glede na fiksnega. V navedenem primeru s kolesom je translacijsko gibanje točke obroča kolesa posledica translacijskega premikanja koordinatnega sistema Približno 1 ξηζ glede na fiksni koordinatni sistem Axy.
Enačbe za absolutno gibanje točke dobimo tako, da koordinate točke x, y, z izrazimo kot funkcijo časa:
x=x(t), y = y(t), z = z(t).
Enačbe za relativno gibanje točke imajo obliko
ξ = ξ (t), η = η (t), ζ = ζ (t).
V parametrični obliki enačbe (11.76) izražajo enačbe absolutne trajektorije, enačbe (11.77) pa enačbe relativne trajektorije.

Ločimo tudi absolutno, prenosno in relativno hitrost oziroma absolutni, prenosni in relativni pospešek točke. Absolutna hitrost je υ a, relativno - υ r, prenosni - υ e V skladu s tem so pospeški: ω a, ω r in ω e.
Glavna naloga kinematike kompleksnega gibanja točke je vzpostaviti razmerje med hitrostmi in pospeški točke v dveh koordinatnih sistemih: fiksnem in gibljivem.
Za dokazovanje izrekov o seštevanju hitrosti in pospeškov pri kompleksnem gibanju točke uvedemo koncept lokalnega ali relativnega odvoda.
Izrek o dodajanju hitrosti
Izrek . Pri kompleksnem (sestavljenem) gibanju točke njena absolutna hitrost υ a je enaka vektorski vsoti relativne υ r in prenosni υ e hitrosti.
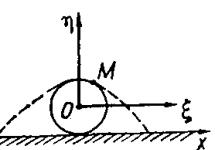
Naj se točka M sočasno premakne glede na fiksni in gibljivi koordinatni sistem (slika 56). Označimo kotno hitrost vrtenja koordinatnega sistema Оξηζ skozi ω . Položaj točke M je določen z radij vektorjem r.
Ugotovimo razmerje med hitrostmi točke M glede na dva koordinatna sistema – mirujočega in gibljivega. Na podlagi izreka, dokazanega v prejšnjem razdelku
![]()
Iz kinematike točke je znano, da prvi odvod radij-vektorja gibljive točke glede na čas izraža hitrost te točke. Zato = r = υ a- absolutna hitrost, = υ r- relativna hitrost,
A ω x r = υ e- prenosna hitrost točke M. Zato
υ a= υ r+υ e
Formula (11.79) izraža pravilo hitrostnega paralelograma. Modul absolutne hitrosti najdemo s kosinusnim izrekom:
Pri nekaterih problemih kinematike je potrebno določiti relativno hitrost υ r. Iz (11.79) sledi
υ r\u003d υ a + (- υ e).
Torej, da bi zgradili vektor relativne hitrosti, je treba geometrijsko dodati absolutno hitrost z vektorjem, ki je enak absolutni vrednosti, vendar nasprotno usmerjen translacijski hitrosti.
§ 2. 5. Gibanje: absolutno, relativno, figurativno. Eulerjev izrek. Kotna hitrost.
Poleg nepremičnih osi Oxyz (sistem S) uvedemo v obravnavo neko gibljivo togo telo in z njim vedno povezan sistem pravokotnih koordinatnih osi O’x’y’z’ (sistem S’).
Gibanje točke glede na premični sistem osi S' imenujemo relativno gibanje.
Imenuje se gibanje točke glede na nepremične osi S absolutno gibanje.
prenosno gibanje točka za časovni interval (t, t + Dt) je gibanje glede na osi S, ki bi ga ta točka imela, če bi bila v času t in za interval (t, t + Dt) vedno povezana s premikanjem sistem osi in bi se zato premikal s tem sistemom.
Trajektorija, hitrost in pospešek se imenujejo absolutni, relativni ali translacijski, odvisno od tega, ali se nanašajo na absolutno, relativno ali translacijsko gibanje.
Eulerjev izrek:Če ima sistem S" eno fiksno točko glede na sistem S, potem lahko premik S" iz enega poljubnega položaja v kateri koli drug dosežemo z enim vrtenjem za določen kot okoli osi, ki poteka skozi to fiksno točko.
Za dokaz zadostuje, da pokažemo možnost prevajanja z enim obratom loka, na primer .
|
|
|
||
|
|
Narišimo dva ekvatorja: a, pravokoten na sredino x 1 "x 2", in b, pravokoten na sredino z 1 "z 2". Dobimo dve presečni točki teh ekvatorjev - c in d. Dx 1"z 1"d = Dz 2"x 2"d (ker je x 1 "z 1" \u003d x 2 "z 2" in x 1 "d \u003d x 2 "d zaradi dejstva, da točka d leži na ekvatorju pravokotno na sredino x 1 "x 2" , z 1 "d = z 2" d iz istega razloga) Tako je Ðx 1 "dz 1" \u003d Ðz 2 "dx 2" in je kot med lokoma x 1 "d in x 2 "d enak kotu med lokoma z 1 "d in z 2 "d, to je, morate zasukati x 1 " z 1 "glede na os dO" c za kot x 1 "dz 1" (ali enak z 2 "dx 2") |
||
|
|
|||




Eulerjev izrek velja tako za končne kot za infinitezimalne rotacije. Čeprav je zaporedje neskončno majhnih rotacij lahko poljubno - rezultat bo enak, vendar končne rotacije ne komutirajo. To še toliko bolj velja za infinitezimalne rotacije, čim bližje so loki, ki jih opisuje katera koli točka, tetivam, ki povezujejo konca lokov.
Pri obravnavi problemov gibanja telesa z eno fiksno točko, ki so velikega praktičnega pomena, se trije Eulerjevi koti pogosto uporabljajo za določitev (fiksiranje) položaja sistema S "glede na S.

Presečišče ravnin O "xy in O" x "y" daje premico, ki jo imenujemo črta vozlišč (ort črte vozlišč je ). Prvi Eulerjev kot j je kot med osjo O"x in črto vozlišč. Drugi kot y je kot med črto vozlišč in osjo O"x". Tretji kot q je kot med O " z in O "z" osi.
Ti trije koti enolično določajo položaj sistema S" glede na S
Tako lahko za neskončno majhen vrtenje sistema S" glede na S za kote dj, dy, dq (nekateri od njih so lahko enaki nič) nadomestimo z enim vrtenjem za kot dc okoli neke osi, ki gre skozi točka O".
Upoštevajmo vektor infinitezimalne rotacije:
![]() (Tukaj
(Tukaj ![]() usmerjen vzdolž osi vrtenja po pravilu desnega vijaka)
usmerjen vzdolž osi vrtenja po pravilu desnega vijaka)
Velikost in smer vektorja dc se lahko spremenita med kompleksnim gibanjem. Os se imenuje os trenutnega vrtenja. Poglejmo, kaj se zgodi z enotskimi vektorji sistema S", ko ga zavrtimo za kot
§ 2. 6. Zapleteno gibanje točke.

Če ločimo to razmerje glede na čas, dobimo:

Absolutna hitrost točke (glede na sistem S),
Hitrost izhodišča S" glede na S,
Ali ni hitrost točke M glede na sistem S", saj so orte tega sistema funkcije časa.
 ,
,
z uporabo formul (2.5.1) bomo imeli:
Zadnji člen pomeni, da je odvod vzet pri konstantnih vektorjih enote sistema O’x’y’z’, .
Zdaj imamo za hitrosti:
tukaj je v h prenosljiv, v absoluten, v’ relativna hitrost točke, to pomeni, da je bila pridobljena povezava teh hitrosti. Translacijska hitrost je sestavljena iz dveh izrazov: prvi je prisoten, če se premikajoči okvir premika naprej, drugi pa se pojavi, če se premikajoči okvir vrti.
Da dobimo povezavo pospeškov, razlikujemo razmerje za hitrosti glede na čas:

Absolutni pospešek, - pospešek izhodišča S' glede na S.
Premika se glede na en referenčni okvir, ta pa glede na drug referenčni okvir. To postavlja vprašanje razmerja med gibi točke v teh dveh FR.
Običajno je eden od RM izbran kot osnovni ("absolutni"), drugi se imenuje "mobilni" in uvedeni so naslednji izrazi:
- absolutno gibanje- to je gibanje točke/telesa v osnovi CO.
- relativno gibanje- to je gibanje točke / telesa glede na premikajoči se referenčni okvir.
- prenosno gibanje je gibanje drugega CO glede na prvega.
Predstavljeni so tudi pojmi ustreznih hitrosti in pospeškov. Translacijska hitrost je na primer hitrost točke, ki je posledica gibanja gibljivega referenčnega sistema glede na absolutni. Z drugimi besedami, to je hitrost točke gibljivega referenčnega sistema, ki v danem trenutku sovpada z materialno točko.
Izkazalo se je, da je pri pridobivanju povezave med pospeški v različnih referenčnih okvirih potrebno uvesti še en pospešek zaradi vrtenja premikajočega se referenčnega okvira:
Pri nadaljnji obravnavi se domneva, da je osnovni CO inercialen, za mobilnega pa ni nobenih omejitev.
klasična mehanika
Kinematika kompleksnega gibanja točke
Hitrost
.Glavne naloge kinematike kompleksnega gibanja so ugotoviti odvisnosti med kinematičnimi značilnostmi absolutnega in relativnega gibanja točke (ali telesa) in značilnostmi gibanja gibljivega referenčnega sistema, to je prenosnega gibanja. Za točko so te odvisnosti naslednje: absolutna hitrost točke je enaka geometrijski vsoti relativne in translacijske hitrosti, tj.
.Pospešek
Povezavo pospeškov najdemo z razlikovanjem povezave za hitrosti, pri čemer ne pozabimo, da so koordinatni vektorji gibljivega koordinatnega sistema lahko odvisni tudi od časa.
Absolutni pospešek točke je enak geometrijski vsoti treh pospeškov - relativnega, translacijskega in Coriolisovega, tj.
.Kinematika kompleksnega gibanja telesa
Pri togem telesu, ko so vsa sestavljena (torej relativna in translacijska) gibanja translacijska, je translacijsko tudi absolutno gibanje s hitrostjo, ki je enaka geometrijski vsoti hitrosti sestavljenih gibanj. Če so sestavljena gibanja telesa rotacijska okoli osi, ki se sekajo v eni točki (kot na primer v žiroskopu), potem je tudi posledično gibanje rotacijsko okoli te točke s trenutno kotno hitrostjo, ki je enaka geometrijski vsoti kotnih hitrosti. sestavljenih gibov. Če so sestavljena gibanja telesa translacijska in rotacijska, bo nastalo gibanje v splošnem primeru sestavljeno iz niza trenutnih vijačnih gibov.
Razmerje med hitrostmi različnih točk togega telesa v različnih referenčnih sistemih lahko izračunate tako, da združite formulo za seštevanje hitrosti in Eulerjevo formulo za povezavo hitrosti točk togega telesa. Povezavo pospeškov ugotovimo s preprostim diferenciranjem dobljene vektorske enakosti glede na čas.
Dinamika kompleksnega gibanja točke
Pri obravnavanju gibanja v neinercialnem CO sta kršena prva 2 Newtonova zakona. Za zagotovitev njihove formalne izvedbe se običajno uvedejo dodatne, fiktivne (dejansko neobstoječe) vztrajnostne sile: centrifugalna sila in Coriolisova sila. Izraze za te sile dobimo iz povezave pospeškov (prejšnji razdelek).
Relativistična mehanika
Hitrost
Pri hitrostih blizu svetlobne hitrosti Galilejeve transformacije niso ravno invariantne in klasična formula za seštevanje hitrosti preneha veljati. Namesto tega so Lorentzove transformacije invariantne in razmerje med hitrostmi v dveh inercialnih referenčnih sistemih je pridobljeno na naslednji način:
ob predpostavki, da je hitrost usmerjena vzdolž x-osi sistema S. Lahko vidimo, da se v meji nerelativističnih hitrosti Lorentzove transformacije reducirajo na Galilejeve transformacije.
Vendar je uvedena količina - hitrost - ki je aditivna pri prehodu iz enega CO v drugega.
Premika se glede na en referenčni okvir, ta pa glede na drug referenčni okvir. To postavlja vprašanje razmerja med gibi točke v teh dveh FR.
Običajno je eden od RM izbran kot osnovni ("absolutni"), drugi se imenuje "mobilni" in uvedeni so naslednji izrazi:
- absolutno gibanje- to je gibanje točke/telesa v osnovi CO.
- relativno gibanje- to je gibanje točke / telesa glede na premikajoči se referenčni okvir.
- prenosno gibanje je gibanje drugega CO glede na prvega.
Predstavljeni so tudi pojmi ustreznih hitrosti in pospeškov. Translacijska hitrost je na primer hitrost točke, ki je posledica gibanja gibljivega referenčnega sistema glede na absolutni. Z drugimi besedami, to je hitrost točke gibljivega referenčnega sistema, ki v danem trenutku sovpada z materialno točko.
Izkazalo se je, da je pri pridobivanju povezave med pospeški v različnih referenčnih okvirih potrebno uvesti še en pospešek zaradi vrtenja premikajočega se referenčnega okvira:
Pri nadaljnji obravnavi se domneva, da je osnovni CO inercialen, za mobilnega pa ni nobenih omejitev.
klasična mehanika
Kinematika kompleksnega gibanja točke
Hitrost
.Glavne naloge kinematike kompleksnega gibanja so ugotoviti odvisnosti med kinematičnimi značilnostmi absolutnega in relativnega gibanja točke (ali telesa) in značilnostmi gibanja gibljivega referenčnega sistema, to je prenosnega gibanja. Za točko so te odvisnosti naslednje: absolutna hitrost točke je enaka geometrijski vsoti relativne in translacijske hitrosti, tj.
.Pospešek
Povezavo pospeškov najdemo z razlikovanjem povezave za hitrosti, pri čemer ne pozabimo, da so koordinatni vektorji gibljivega koordinatnega sistema lahko odvisni tudi od časa.
Absolutni pospešek točke je enak geometrijski vsoti treh pospeškov - relativnega, translacijskega in Coriolisovega, tj.
.Kinematika kompleksnega gibanja telesa
Pri togem telesu, ko so vsa sestavljena (torej relativna in translacijska) gibanja translacijska, je translacijsko tudi absolutno gibanje s hitrostjo, ki je enaka geometrijski vsoti hitrosti sestavljenih gibanj. Če so sestavljena gibanja telesa rotacijska okoli osi, ki se sekajo v eni točki (kot na primer v žiroskopu), potem je tudi posledično gibanje rotacijsko okoli te točke s trenutno kotno hitrostjo, ki je enaka geometrijski vsoti kotnih hitrosti. sestavljenih gibov. Če so sestavljena gibanja telesa translacijska in rotacijska, bo nastalo gibanje v splošnem primeru sestavljeno iz niza trenutnih vijačnih gibov.
Razmerje med hitrostmi različnih točk togega telesa v različnih referenčnih sistemih lahko izračunate tako, da združite formulo za seštevanje hitrosti in Eulerjevo formulo za povezavo hitrosti točk togega telesa. Povezavo pospeškov ugotovimo s preprostim diferenciranjem dobljene vektorske enakosti glede na čas.
Dinamika kompleksnega gibanja točke
Pri obravnavanju gibanja v neinercialnem CO sta kršena prva 2 Newtonova zakona. Za zagotovitev njihove formalne izvedbe se običajno uvedejo dodatne, fiktivne (dejansko neobstoječe) vztrajnostne sile: centrifugalna sila in Coriolisova sila. Izraze za te sile dobimo iz povezave pospeškov (prejšnji razdelek).
Relativistična mehanika
Hitrost
Pri hitrostih blizu svetlobne hitrosti Galilejeve transformacije niso ravno invariantne in klasična formula za seštevanje hitrosti preneha veljati. Namesto tega so Lorentzove transformacije invariantne in razmerje med hitrostmi v dveh inercialnih referenčnih sistemih je pridobljeno na naslednji način:
ob predpostavki, da je hitrost usmerjena vzdolž x-osi sistema S. Lahko vidimo, da se v meji nerelativističnih hitrosti Lorentzove transformacije reducirajo na Galilejeve transformacije.
Literatura
- N. G. Četajev. "Teoretična mehanika". M.: Znanost. 1987. 368 str.
Doslej smo proučevali gibanje točke ali telesa glede na določen referenčni sistem. Vendar pa se v številnih primerih pri reševanju problemov v mehaniki izkaže, da je primerno (in včasih potrebno) obravnavati gibanje točke (ali telesa) hkrati glede na dva referenčna sistema, od katerih je eden obravnavan glavna ali pogojno nepremična, druga pa se giblje na določen način glede na prvo.
Gibanje, ki ga v tem primeru izvaja točka (ali telo), imenujemo sestavljeno ali kompleksno. Na primer, za kroglo, ki se kotali po palubi premikajočega se parnika, lahko štejemo, da izvaja zapleteno gibanje glede na obalo, ki je sestavljeno iz kotaljenja glede na palubo (gibajoči se referenčni okvir) in premikanja skupaj s palubo ladje, ki se nanaša na obalo. do obale (fiksen referenčni okvir). Na ta način se zapleteno gibanje žoge razdeli na dve enostavnejši in lažji za raziskovanje. Sposobnost razgradnje kompleksnejšega gibanja točke ali telesa na enostavnejša z uvedbo dodatnega (gibajočega se) referenčnega sistema se pogosto uporablja v kinematičnih izračunih in določa praktično vrednost teorije kompleksnega gibanja, obravnavane v tem in naslednje poglavje. Poleg tega se rezultati te teorije uporabljajo v dinamiki za preučevanje relativnega ravnovesja in relativnega gibanja teles pod delovanjem sil.
Razmislite o točki M, ki se premika glede na gibljivi referenčni okvir, ta pa se nekako premika glede na drug referenčni okvir, ki ga imenujemo glavni ali pogojno fiksni (slika 182). Vsak od teh referenčnih sistemov je seveda povezan z določenim telesom, ki na risbi ni prikazano. Predstavljamo naslednje definicije.
1. Gibanje točke M glede na gibljivi referenčni sistem (na osi) se imenuje relativno gibanje (takšno gibanje bo videl opazovalec, ki je povezan s temi osemi in se giblje z njimi).
Trajektorija AB, ki jo opisuje točka v relativnem gibanju, se imenuje relativna trajektorija. Hitrost točke M glede na osi Oxyz imenujemo relativna hitrost (označeno), pospešek pa relativni pospešek (označeno). Iz definicije izhaja, da lahko premikanje osi pri izračunu zanemarimo (obravnavamo jih kot mirujoče).
2. Gibanje, ki ga naredi gibljivi referenčni okvir Oxyz (in vse točke prostora, ki so vedno povezane z njim) glede na fiksni okvir, je prenosljivo gibanje za točko M.
Hitrost tiste točke, ki je vedno povezana z gibljivimi osemi Oxyz, s katero gibljiva točka M sovpada v danem trenutku, se imenuje prenosna hitrost točke M v tem trenutku (označena z iper), pospešek te točke pa točko imenujemo prenosni pospešek točke M (označeno z arr). torej
Če si predstavljamo, da se relativno gibanje točke dogaja na površini (ali znotraj) togega telesa, s katerim sta gibljivi osi Oxyz togo povezani, potem je prenosna hitrost (ali pospešek) točke M v danem trenutku bo hitrost (ali pospešek) tiste točke telesa, ki v tem trenutku sovpada s točko M.
3. Gibanje točke glede na fiksni referenčni okvir se imenuje absolutno ali kompleksno. Trajektorija CD tega gibanja se imenuje absolutna trajektorija, hitrost je absolutna hitrost (označeno ) in pospešek se imenuje absolutni pospešek (označeno ).
V zgornjem primeru bo gibanje žoge glede na krov parnika relativno, hitrost pa bo relativna hitrost žoge; gibanje parnika glede na obalo bo prenosno gibanje za žogico in hitrost tiste točke na krovu, ki se je žogica dotakne v danem trenutku, bo njena prenosna hitrost v tem trenutku; končno bo gibanje žoge glede na obalo njeno absolutno gibanje, hitrost pa bo absolutna hitrost žoge.
Za rešitev ustreznih problemov kinematike je potrebno ugotoviti razmerja med relativnimi, translacijskimi in absolutnimi hitrostmi in pospeški točke, na kar bomo prešli.